# Input file for BushMissonGen
#
# Auto-generated in v4.07
author=Kyubot
title=Gimhae landing VOR DME-A 18R
project=rkpk-rwy18r
version=1.0.0
location=Gimhae Intl
plane=Airbus A320 Neo Asobo
tailNumber=N9999DE
airlineCallSign=HL
flightNumber=1234
introSpeech=
simFile=runway.FLT
parkingBrake=0.00
description=Circle to land Gimhae 18R, ROK
loadingTip=Generated by BushMissionGen.
intro=Try to land one of the most challenging approach to Gimhae RWY 18. You are located 15 DME from KMH R225. Maintain heading 45 until D3 and enter downwind. Then make right turn to land runway 18R while avoiding terrains.
latitude=N35°0'11.82"
longitude=E128°43'23.49"
altitude=+4000.00
pitch=0
bank=0
heading=45
weather=.\WeatherPresets\FewClouds.WPR
season=SUMMER
year=2022
day=167
hours=12
minutes=30
seconds=0
missionType=landing
challengeType=Famous
velocity=200
#icao rw name type LL alt
||CUST0|U|N35° 0' 11.82",E128° 43' 23.49"|+004000.00
||CUST1|U|N35° 0' 11.82",E128° 43' 23.49"|+004000.00
||CUST2|U|N35° 8' 41.63",E128° 53' 42.73"|+002700.00
||CUST3|U|N35° 11' 53.59",E128° 53' 12.74"|+001683.60
||CUST4|U|N35° 13' 17.91",E128° 55' 41.66"|+000854.25
RKPK|18R|RKPK|A|N35° 10' 50.01",E128° 56' 16.98"|+000010.00
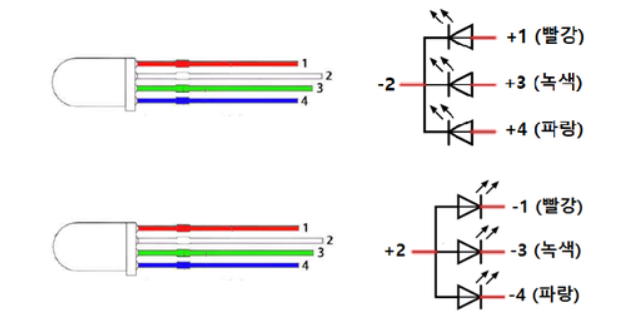
한개의 LED 안에 빨강(R), 녹색(G), 파랑(B)색 LED 그리고 아주 작은 컨트롤러가 내장된 RGB형 LED이다.
일반적인 RGB형 LED들이 1개의 Common Cathod(음극) 또는 1개의 Common Anode(양극)으로 구성되어
각각의 핀에 High 또는 Low 신호를 주어서 제어하는 방식이다. 보통은 PWM신호를 만들어서 밝기를 제어한다.
이 방식은 1개의 LED를 제어하기에는 편하지만 여러개의 LED를 제어하려면 LED갯수 x 3개 만큼의 PWM 핀이 필요하므로 MCU에 부담이 커진다.
WS2812는 각각의 LED에 컨트롤러를 내장하여 +, -외에 1개의 신호를 입력받아 R,G,B의 밝기를 제어할 수 있는 제품이다. 그리고 신호선에는 입력용 신호 (DI)와 출력용 신호(DO)가 있는데 이 신호선끼리 Input 과 Output을 연결하면 여러개의 LED를 동시에 제어할 수 있다.
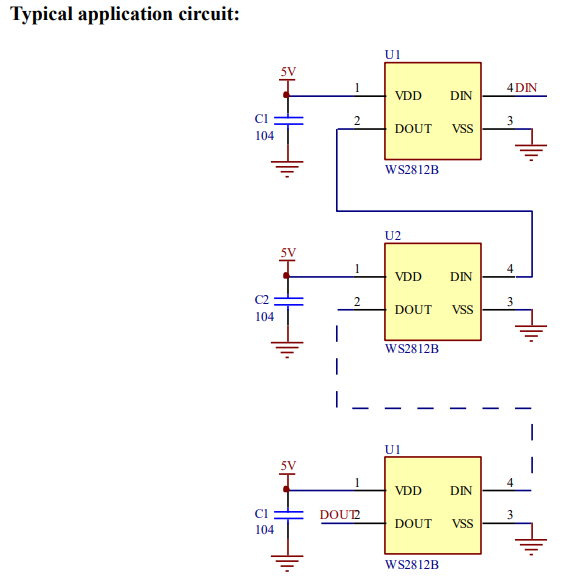
WS2812 연결방법
일반적인 연결 방식은 다음과 같다.
LED3개를 일렬로 연결하는데 첫번째 LED의 DIN은 컨트롤러의 핀으로 연결하고 DOUT을 다음 LED의 DIN으로
그리고 DOUT은 다음 LED의 DIN으로 연결하는 방식이다.
이렇게 하면 몇개의 LED든 3가닥의 선으로 연결할 수 있게 되는데 이러한 연결 방식을 데이지 체인 혹은 Cascade 방식이라고도 한다.
WS2812의 연결 방식
제어 프로토콜
그럼 대체 1개의 선으로 어떻게 R,G,B 값을 보내고 또 그것을 여러개의 LED에 전달하는 것일까?
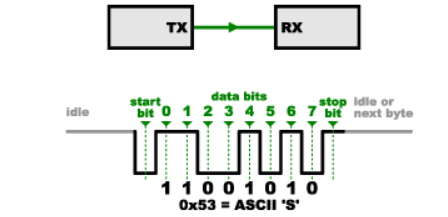
언뜻 매우 복잡한 신호가 필요할꺼 같지만 실은 단순히 0과 1의 조합일 뿐이다.
대신 1개의 선으로 보내야 하므로 0과 1을 구분하기 위해 미리 정해진 시간만큼의 High 신호와 Low 신호의 비율로 전송해야 하고 그 규격은 다음과 같다.
1개의 신호는 약 1.25uS +/-0.6uS로 되어있고 이 시간 안에 0.9uS만큼의 High 신호가 있으면 1로 인식하고 이보다 적은 0.35uS만큼의 High신호로 감지되면 0으로 인식한다.
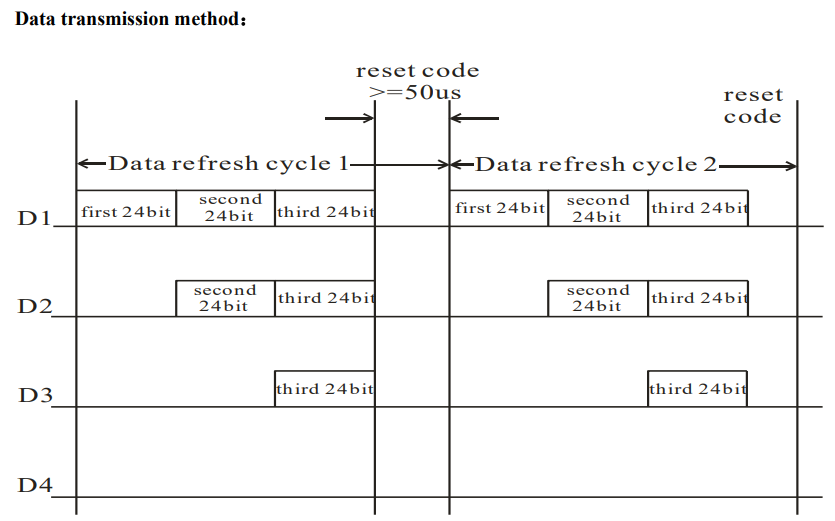
RGB값은 각각 0~255까지 8bit로 표현할 수 있으므로 8x3 = 24개의 비트를 보내면 1개의 제어신호(Data)가 완성된다.
n개의 LED를 제어하는 경우 한번에 n개의 제어신호를 한꺼번에 보내야 한다.
그리고 다음 신호는 최소 50uS 이후에 보낼 수 있다.
다음 다이어그램은 D1을 지난 신호가 DOUT을 거쳐 D2에 전달될때 첫번째 Data가 사라진 것을 확인할 수 있다.
그리고 D2를 지난 신호에는 D3의 Data만 남아있게 된다.
이것은 마치 기차가 한개의 역을 지날때마다 객차가 1개씩 사라지는것과 같다.
이제 각각의 데이터를 살펴보면 R,G,B 순서가 아닌 G, R, B의 순서로 되어있음을 알 수 있다.
그리고 각 byte는 MSB(Most Significant Byte First)로 좌측 정렬되어있다.
제어 방법
STM32계열 MCU에서 이러한 데이터를 만드는 방법은 크게 2가지가 있다.
1. PWM을 변조하여 보내는 방법
2. SPI에서 MOSI(Master Output) 신호를 사용하는 방법
1번 방법을 구현하기 위해서는 PWM + DMA 방식이 주로 사용된다.
여기서는 2번 방법을 사용하여 구현하는 방법을 소개한다.
SPI통신은 원래 클럭신호마다 1개의 데이터를 실어서 보내는 제어 방식인데 8개의 클럭을 묶어서 High 신호와 Low 신호의 비율로 나누면 마치 PWM 신호인 것 처럼 보낼 수 있다.
일반적인 SPI신호 방식
CubeMX 설정하기
SPI 핀을 설정하기 위해 CubeMX를 열고 SPI설정을 한다.
여기서는 STM32F429ZI 가 내장된 Nucleo F429ZI를 기준으로 한다.
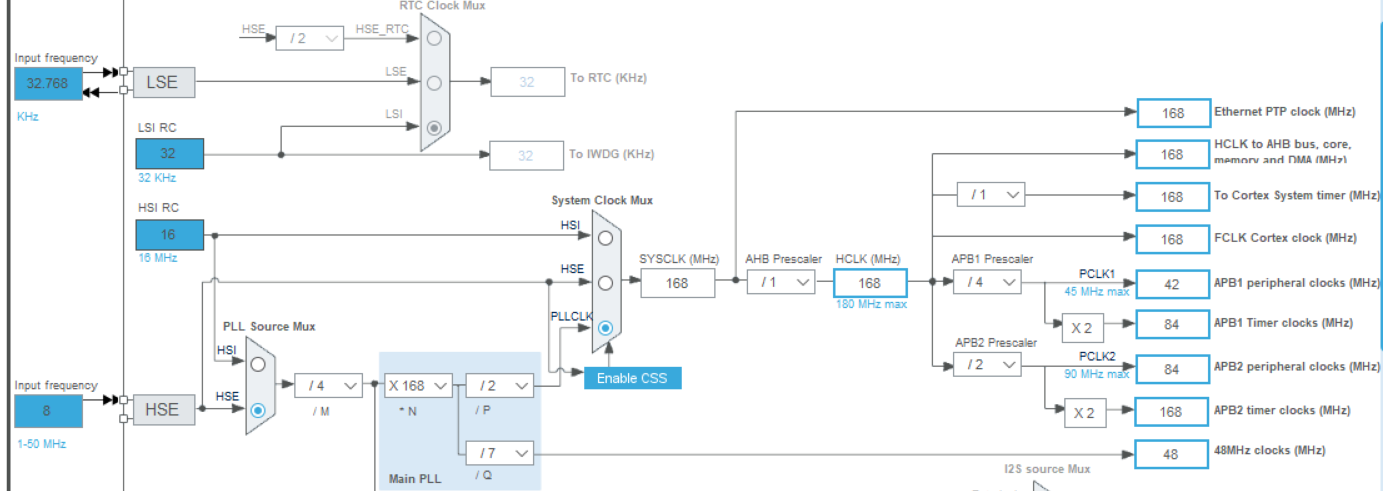
클럭 설정은 다음과 같다.
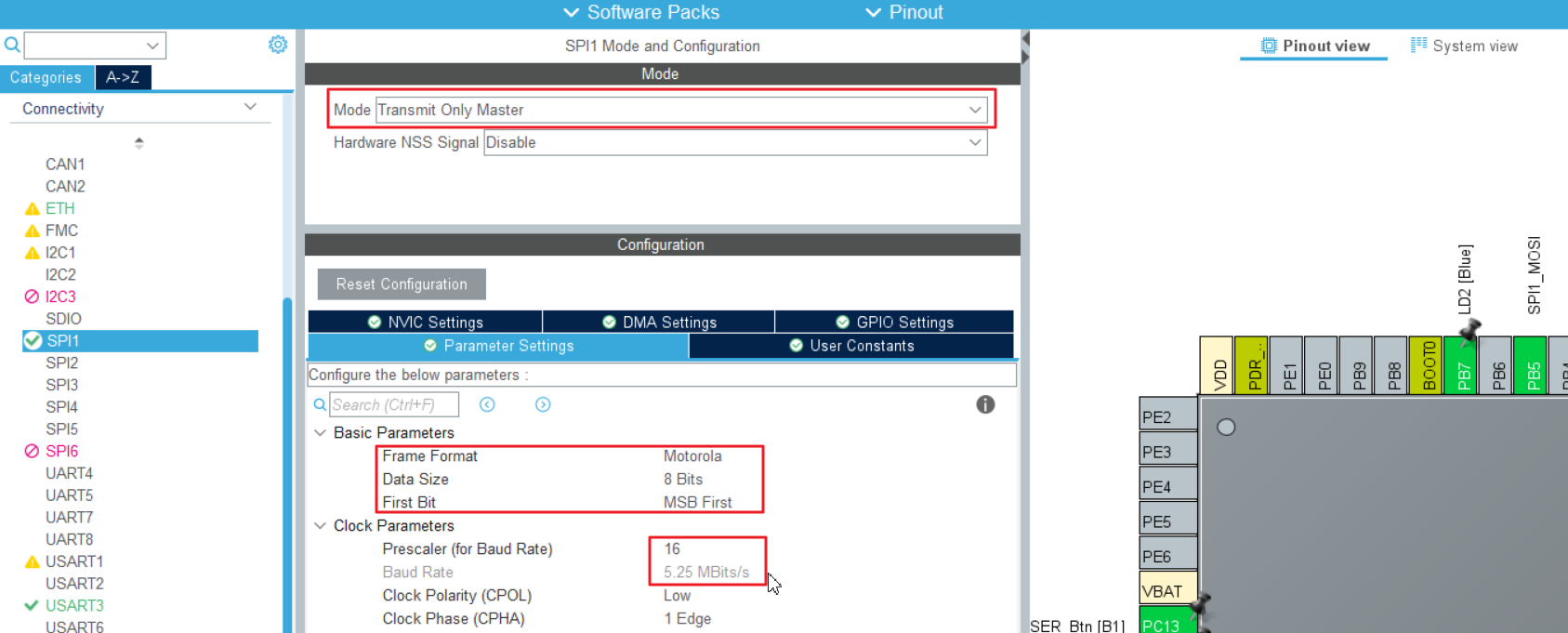
그리고 SPI 설정은 다음과 같다.
RX핀은 사용하지 않으므로 Mode를 Transmit Only Master로 설정하고
Prescaler는 SPI 베이스 클럭을 나눈 값으로 1초당 Bit의 수를 설정한다.
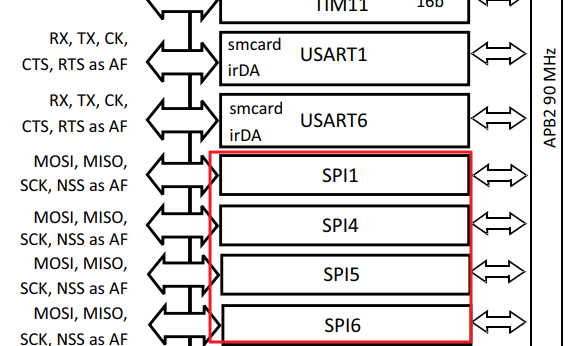
SPI1, 4, 5, 6의 베이스 클럭은 APB2 클럭 또는 84MHz 클럭이 사용된다.
(주의! MCU의 종류에 따라 48MHz 등 다른 클럭으로 동작할 수 있으므로 해당 MCU의 데이터 시트를 확인해야 한다)
Figure 4. STM32F427xx and STM32F429xx block diagram
앞서 WS2812의 제어 방식에서 1개의 bit가 약 1.25uS가 되어야 하므로
1bit/1.25uS * 1000,000uS/1S = 800,000bit/S 또는 800KBits/s 가 된다.
그런데 실제로는 8개의 클럭을 묶어서 보내야 하므로 이 값을 8채배 하면
800K * 8 = 6.4MHz 가 된다. 최대한 근사한 값을 만들기 위해 Prescaler를 조정하면
84000000 / 16 = 5.25MHz 즉 5.25MBits/S 가 된다.
이 값을 Parameter settings에 적용한다.
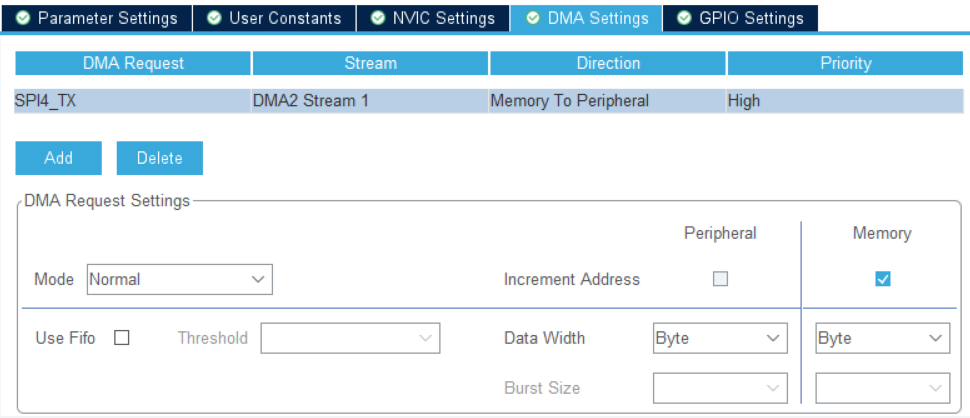
DMA 설정하기
MCU는 LED제어만 하는게 아니므로 정확한 전송 타이밍을 보장하기 위해서는 DMA방식으로 전송하는 것이 권장된다.