ros2 foxy에서 yolov4 object detector를 사용할 수 있는 패키지를 소개한다.
https://github.com/Ar-Ray-code/darknet_ros_fp16/tree/foxy-cudnn
GitHub - Ar-Ray-code/darknet_ros_fp16: darknet + ROS2 Humble + OpenCV4 + CUDA 11(cuDNN, Jetson Orin)
darknet + ROS2 Humble + OpenCV4 + CUDA 11(cuDNN, Jetson Orin) - GitHub - Ar-Ray-code/darknet_ros_fp16: darknet + ROS2 Humble + OpenCV4 + CUDA 11(cuDNN, Jetson Orin)
github.com
설치 환경은 다음과 같다.
Ubuntu 20.04 + ros2 foxy
GPU: RTX3070Ti
CUDA: 11.6
Cudnn 8.3.3
Opencv 3.4.11 with CUDA enabled
패키지 다운로드
ros2_yolo라는 작업공간을 하나 만들고 패키지를 다운로드 한다.
$ mkdir -p ~/ros2_yolo/src
$ cd ~/ros2_yolo/src
$ git clone --recursive https://github.com/Ar-Ray-code/darknet_ros_fp16.git -b foxy-cudnndarknet_ros/CMakeLists.txt 파일을 열고 다음 부분을 GPU의 Architecture에 맞게 수정하고 #을 제거한다.
set(CMAKE_CUDA_ARCHITECTURES 86)빌드하기
colcon 명령어로 빌드한다.
$ cd ~/ros2_yolo
$ colcon build --symlink-install추가 설치
데모 launch를 실행하기 위해 다음 패키지를 설치한다.
$ sudo apt install ros-foxy-v4l2-camera실행하기
이제 빌드된 결과를 source 하고 데모를 실행한다.
$ source install/setup.bash
$ ros2 launch darknet_ros demo-v4-tiny.launch.py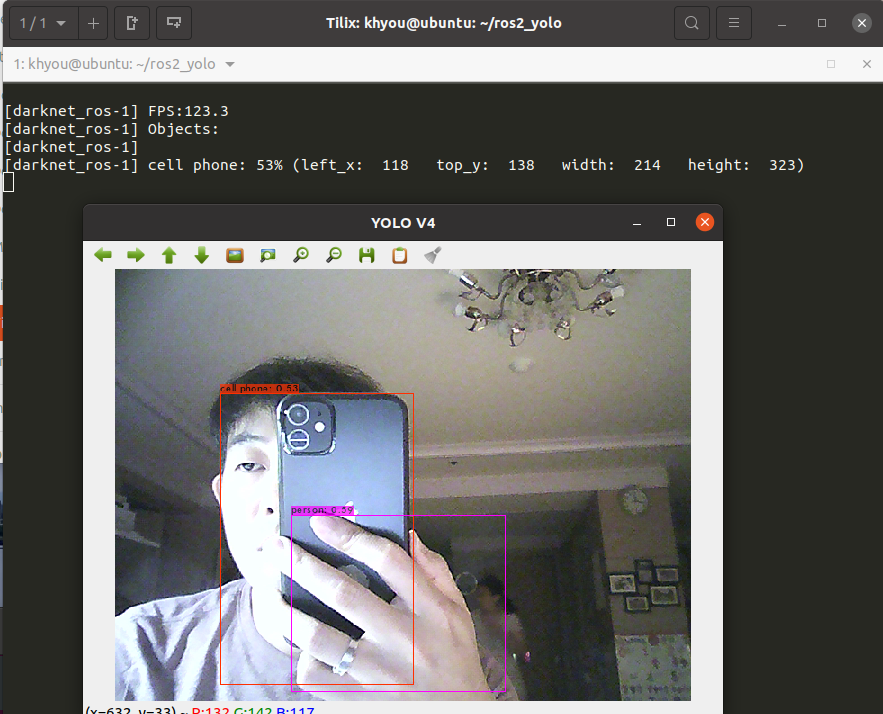
demo-v4-tiny.launch.py 는 카메라 노드를 자동으로 실행시킨다.
만약 카메라를 별도로 실행시키려면 그냥 v4-tiny.launch.py를 실행하면 된다.
'ROBOTICS > ROS 2' 카테고리의 다른 글
| YOLOv4 for ROS 2 foxy (0) | 2022.07.22 |
|---|