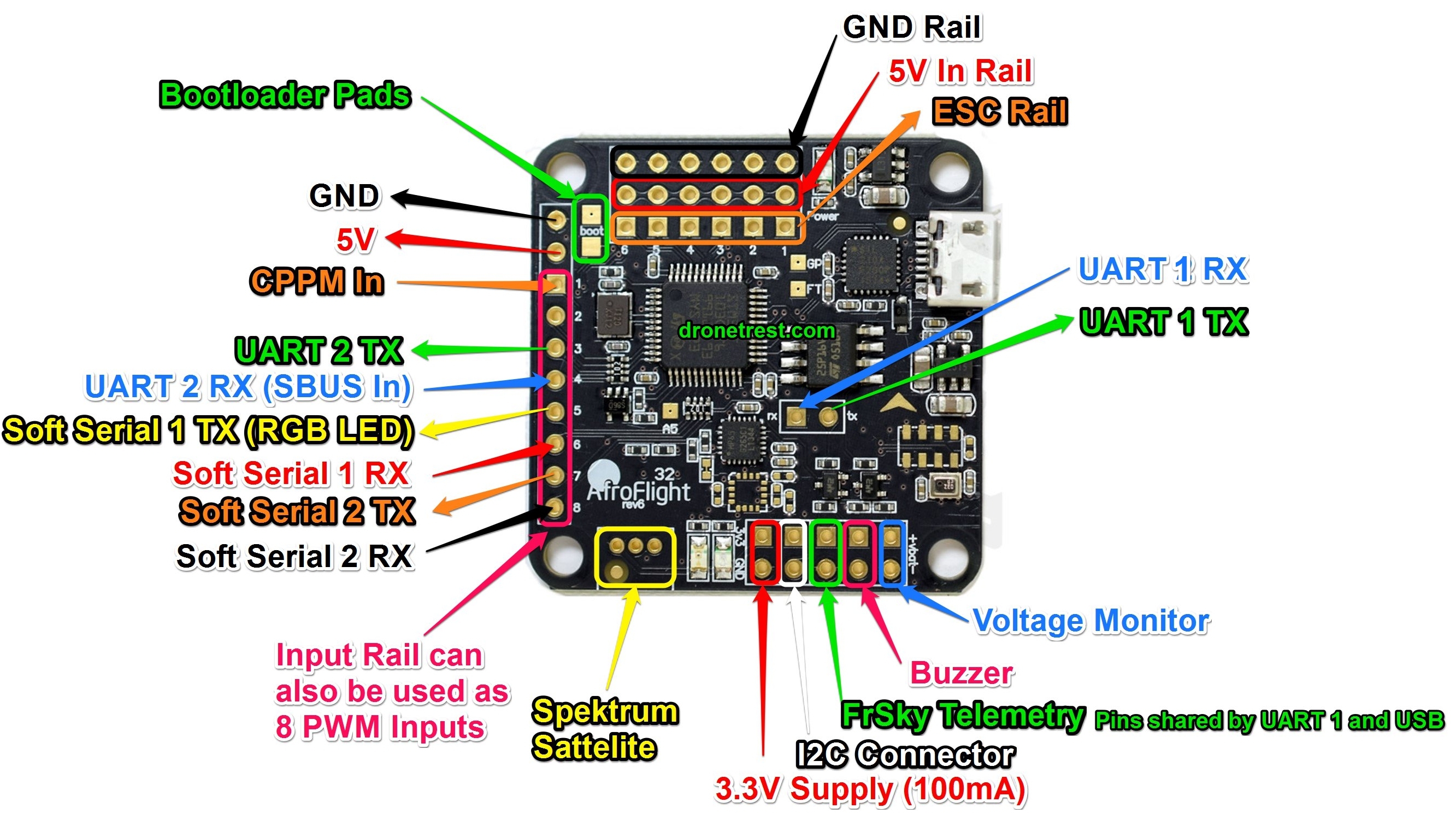
NAZE32 보드는 레이싱 드론 등에 많이 사용되는 소형 FC로 Multiwii 기반의 Clean flight, Betaflight 혹은 Baseflight 의 오픈소스 FC를 지원한다.
나온지 좀 되었지만 가장 저렴하고 소형으로 드론을 구현할 수 있어서 많이 사용된다.
이 보드를 일반적인 드론에 적용해서 비행하는 방법은 인터넷에 많이 나와있으나 이번에는 비행기에 적용해보려고 한다.

비행기는 드론과 달리 추력을 담당하는 모터, 롤, 피치, 요를 제어하는 서보모터 3개로 구성된다.
다행히 Cleanflight의 mixer에서 AIRPLANE모드를 지원하기때문에 쉽게 설정할 수 있을꺼라 생각했다.
하지만 최신 버전의 펌웨어에서는 아무리 설정을 건드리고 별짓을 해봐도 서보로 PWM 출력이 나오지 않는다.
열심히 구글링을 해본 결과 서보제어는 펌웨어는 1.13까지만 지원한다는 글을 발견하였다.
https://www.rcgroups.com/forums/showthread.php?2945436-howto-drive-servos-for-airplane 참조
I have several planes and gliders using Naze32 and SPRacing F3 boards and ran into the same problem.
If you're trying to use Betaflight or Cleanflight 2.x, forget it. You will get no output. Flash with CF 1.13, then it will work.
Also, the pwm output diagram in Cleanflight is incorrect. 1 and 2 are throttle, you'll have to test with a servo to see what does what for the rest of them as I can't remember what the order was.
해당 펌웨어는 아래 링크에서 다운로드할 수 있다.
https://github.com/cleanflight/cleanflight/releases/tag/v1.13.0

주의! 펌웨어를 1.13으로 다운그레이드 하게되면 Cleanflight Configurator 프로그램 역시 해당 버전에 맞춰주어야 한다.
1.13의 Release날짜는 2016년 7월이므로 이보다 전에 릴리즈된 버전을 다운로드해야 한다.
따라서 2016년 5월에 발표된 아래 버전을 다운로드 한다.
https://github.com/cleanflight/cleanflight-configurator/releases/tag/v1.2.2

이 파일은 구글 크롬의 extension으로 동작하므로 크롬에서 설치를 진행해야 한다.
다운로드 하고 압축을 푼 다음
크롬에서 chrome://extensions/ 를 입력하여 developer mode 활성화 하여 압축해재한 폴더를 추가하면 된다.

Launch 버튼을 눌러 프로그램을 실행한 다음 로컬에서 플래시 프로그램을 다운로드 한다.
이제 Mixer 설정을 AIRPLANE으로 하면 정상적으로 서보가 동작함을 확인할 수 있다.
추가 -
만약 최신 버전의 Configurator 에서 설정을 진행하려면 Cleanflight 2.4 에서 고정익 비행기 설정하기 를 참조한다.
'Drone' 카테고리의 다른 글
| Freestyle FPV 드론 만들기 (0) | 2018.11.06 |
|---|---|
| px4 ulog 분석 툴 소개 (9) | 2018.10.04 |
| PX4 프로젝트 업데이트 (0) | 2017.05.30 |
| mac 에서 Qgroundcontrol 안드로이드 빌드하기 (0) | 2017.05.04 |
| PX4 QTCreator 에서 Build 하기 (0) | 2017.04.24 |